In this tutorial were going to walk through the whole process of creating a basic ROS plugin for Gazebo SimulatorSetup a Catkin Workspace. GazeboRosControllerManager plugin provides similar ROS interface as pr2_etherCAT on the physical PR2 robot.

Multi Robot Fleet Simulation With Concurrent Gazebo Simulations Multi Robot Systems Ros Discourse
In this video you will learn how to make the tutorial plugin of Hello World compile and work in a ROS package.

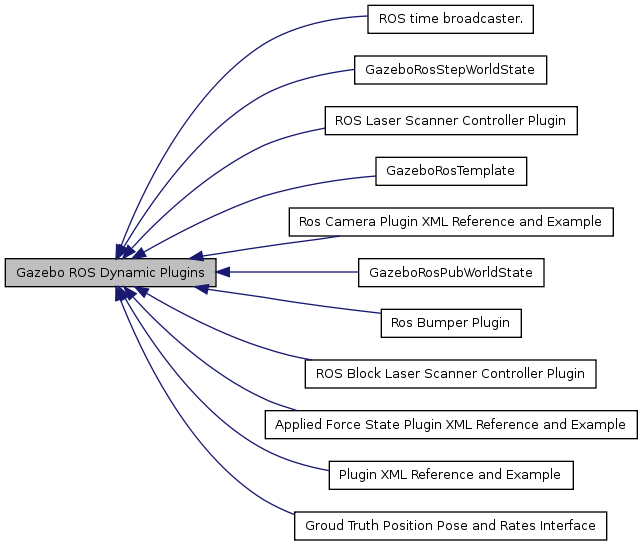
Gazebo ros plugin. In addition to the plugins explained above there are also a number of 3rd party Gazebo-ROS plugins. Gazebo_plugins last edited 2015-10-31 144746 by IsaacSaito Except where otherwise noted the ROS wiki is licensed under the Creative Commons Attribution 30. This video post explains how to integrate Camera plugin with a ROS robot simulated by Gazebo.
The behavior of this controller plugin depends mainly on the parameters of the sensor it is attached to. Formally simulator_gazebo stack gazebo_pkgs is a meta package. Planning to extend the package with AC BLDC stepper and servo motor models as well.
Gazebo --verbose my_worldworld and ensure you wrote the proper plugin name in the world file libmodel_pushso and the plugin has executable permissions Eg. Asked 2016-03-31 230942 -0500. Plugins also dont need to worry about spinning the node or keeping callback queues - gazebo_ros handles all that internally.
I have attempted to reuse other peoples code but without any luck. In ROS 2 plugins use gazebo_rosNode instead which allows each plugin to exist as its own node in the ROS graph with its own parameters namespace loggers etc. If a 3rd party plugin is useful and generic enough please consider pulling it into the official gazebo.
These instructions require the use of the catkin build system. I have included the following code that for. Now you are ready to compile the plugin.
API Docs Browse Code Wiki RosEco gazebo_grasp_plugin package from gazebo_tools repo gazebo_grasp_plugin gazebo_state_plugins gazebo_test_tools gazebo_version_helpers gazebo_world. Create a world file. The value returned as sonar range is the minimum of all rays as a sonar ranger returns the distance corresponding to the first echo returned from a object within its field of view.
This repository demonstrates the. Important functionalities of the real Kobuki have been implemented. Now Catkinized and works with the standalone Gazebo debian.
If you do not have a catkin workspace setup try the following commands. There are several configurations which Gazebo ROS plugins. Roscd cd.
The GazeboRosSonar plugin is a ROS controller for gazebos built-in ray sensor. Write a Gazebo-ROS plugin. This plugin is written in a way that PR2 controller manager works transparently with either this simulated plugin or.
The initialization of the ROS node is performed automatically when you run. All gazebo-ros plugins should check if the ROS node has already been initialized in their Load function as discussed in this issue. Catkin_make Testing the Plugin.
Gazebo Simulation of KingfisherHeron USV Simplest example of using the USV dynamics plugin in an empty Gazebo world. Sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control ROS Melodic. Wrappers tools and additional APIs for using ROS with the Gazebo simulator.
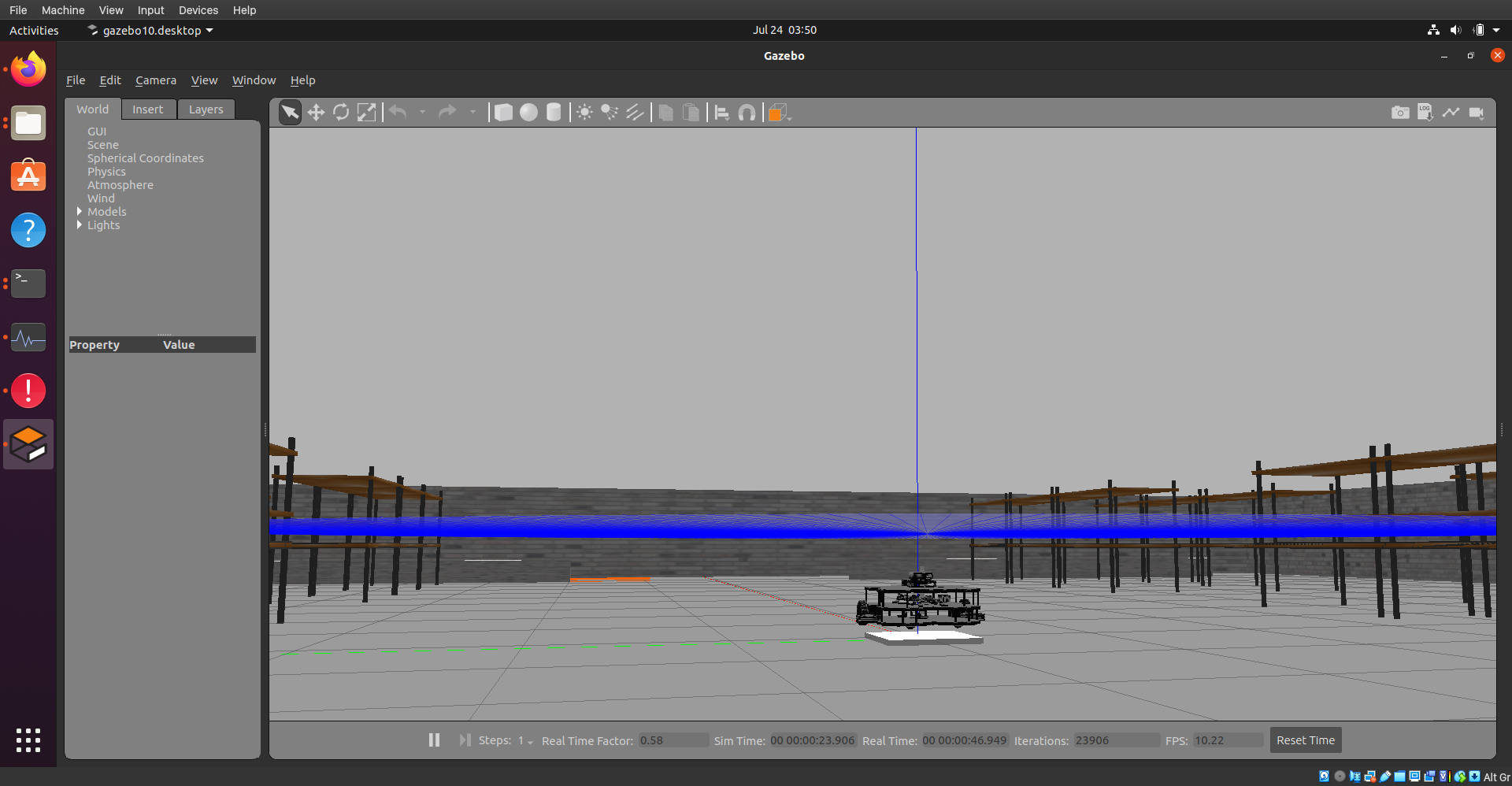
Lets create a world file containing the plugin and launch it to see how it works. This plugin handles the exchange of data between the Kobuki simulation in Gazebo and the ROS world. Httpwwwrosjectiolbe09cefThis video aims to teach how the Gazebo plugins work with ROS and how to.
Kobuki ROS Gazebo plugin. Gazebo ROS motor plugins. See gazebo_plugins wiki page about how you can contribute.
- GitHub - BruceChanJianLegazebo-plugin-ros. Compilation should generate the library containing the plugin inside your building directory. Address most of the review feedback.
This repository demonstrates the procedures to setup and use a Gazebo ROS plugin. Port the gazebo_ros_p3d plugin Port the gazebo_ros_p3d plugin. How to publish data to ROS from Gazebo plugin.
Mkdir -p catkin_wssrc cd. Installing from source is also useful if you want to develop new plugins or submit patches. Hi guys I am trying to learn how to publish data over a ROS topic from a Gazebo plugin class.
Tf data for the base position. This is a Video response to the QA question. Linters ros2 ENABLE_DISPLAY_TESTS and.
Use existing Gazebo-ROS plugins. Gazebo tutorials are organized into Guided and Categorized. Or use the generic emptyworld launch file.
Unlight 1 1 1 1. This repository contains currently two motor plugins one with an ideal speed controller and one without a controller that models a DC motor. Use OnUpdate instead to get the UpdateInfo through the callback parameter.
Gazebo-ROS plugins are stored in a ROS package. Setup A Catkin Workspace. Learn how to simulate camera capture in Gazebo visualize came.
The plugin works when inserted in a world file. Get all the ROS code of the video in this link. Demo test and a bit more cleaning up.
3950 times Last updated. A couple items remain. This plugin is trying to estimate a parametric DC motor by the solution of its electro-mechanical.
However inserting the same plugin in a URDF file bears no effect. I have made a simple Gazebo plugin that rotates an object at a speed it reads from a topic. Remove the model_ member variable since it was just and alias for _parent.
At his point I would recommend you to use the --verbose flag with Gazebo in order to see its log Eg. Sudo chmod x libmodel_pushso. How do I modify the plugin for it to work with my URDF file as well.
2013-10-04 092029 -0500 Seen. Usv_gazebo_plugins last edited 2017-02-21 213746 by BrianBingham Except where otherwise noted the ROS wiki is licensed under the. Documentation is also available for the API and a help forum is located at Gazebo Answers.
Mimic Tag Working In Rviz But Not In Gazebo Ros Answers Open Source Q A Forum

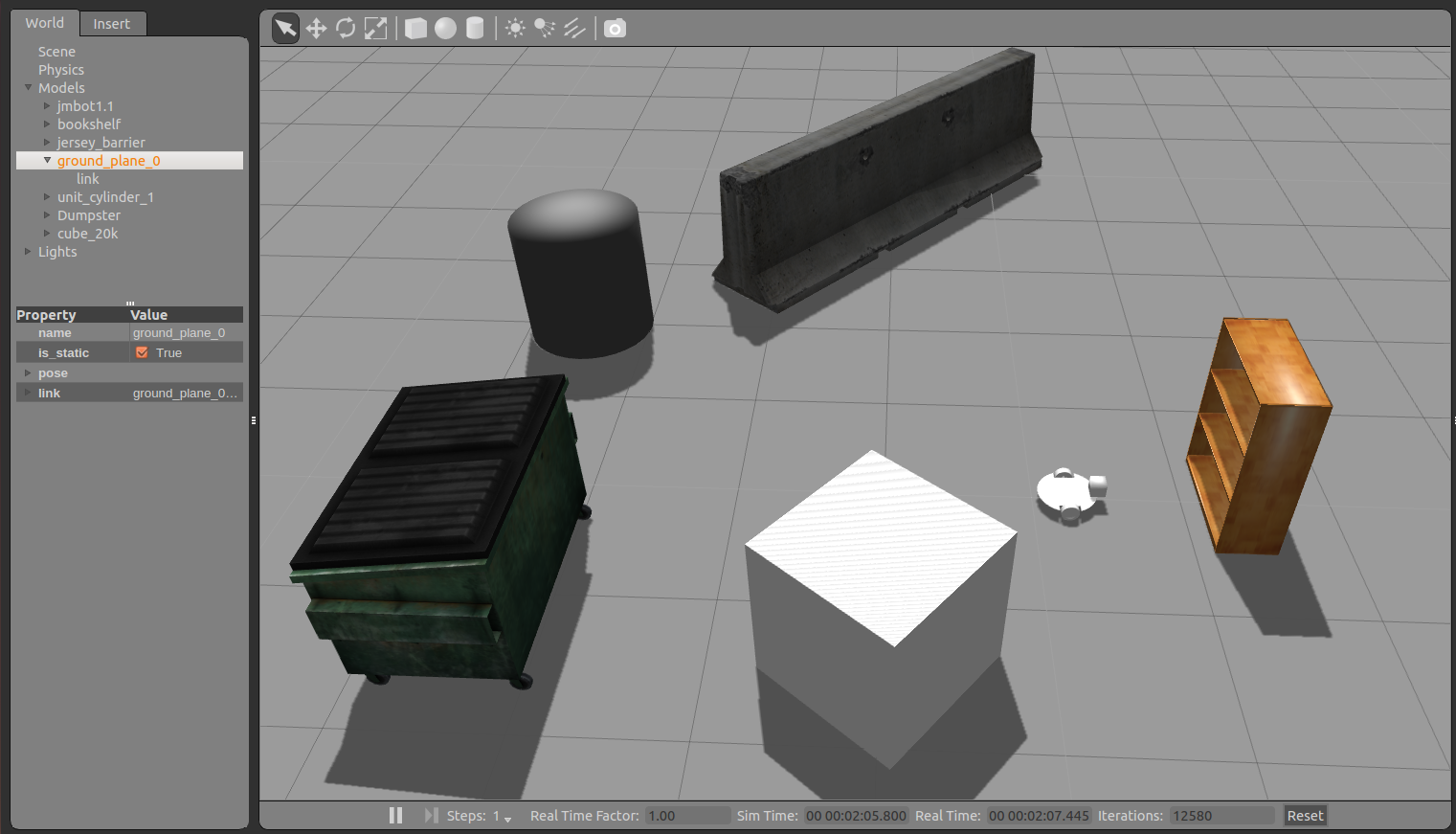
Gazebo Small Warehouse Bookstore And Small House Worlds Available For Simulation General Ros Discourse

Gazebo Gzweb

Ignition Edifice Release General Gazebo Community

Gazebo Camera Plugin Does Not See Some Models That Are In The Simulation Gazebo Q A Forum
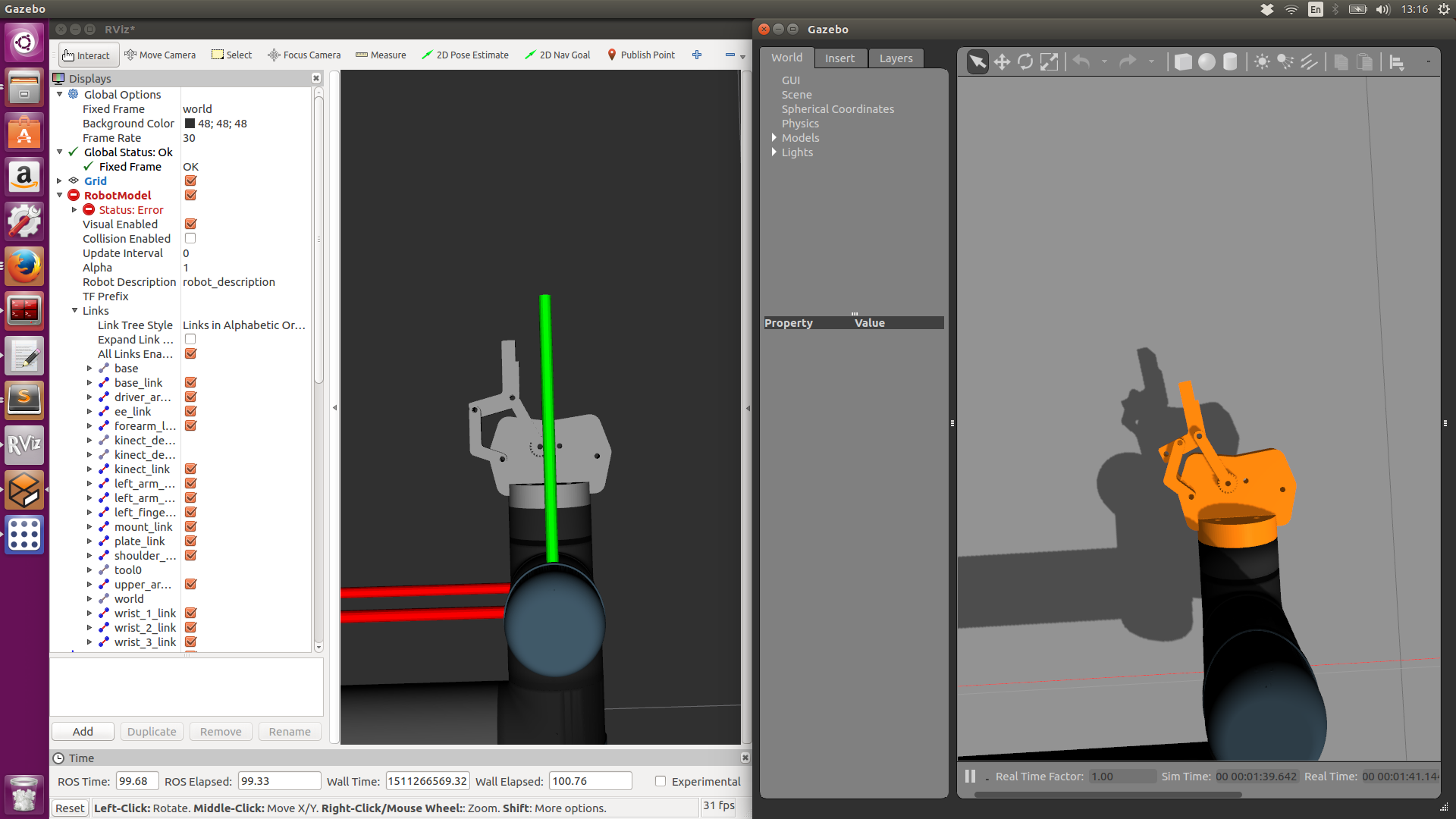
Gazebo Laser Plug In Fails To Publish Scan Results In Rviz Ros Answers Open Source Q A Forum
How To Simulate A Robot Using Gazebo And Ros 2 Automatic Addison
Why Is Robotics Simulation Hard General Ros Discourse

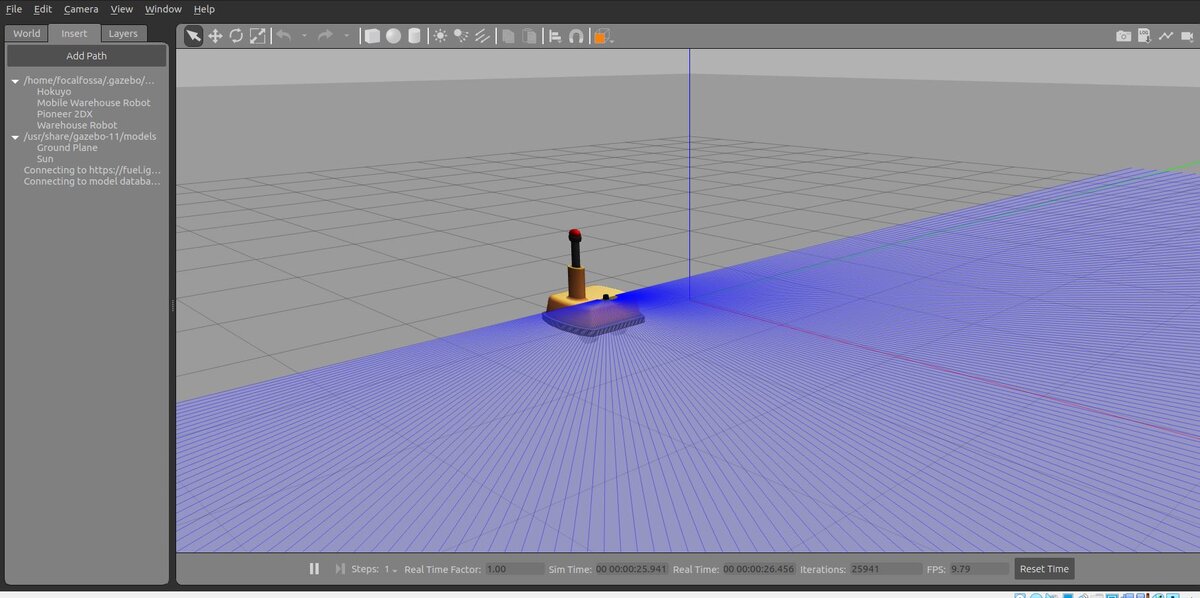
Gazebo In 5 Mins How To Launch Your First Gazebo World Using Ros The Construct

Gazebo Q A 001 How To Create Gazebo Plugins In Ros Part 1 Youtube
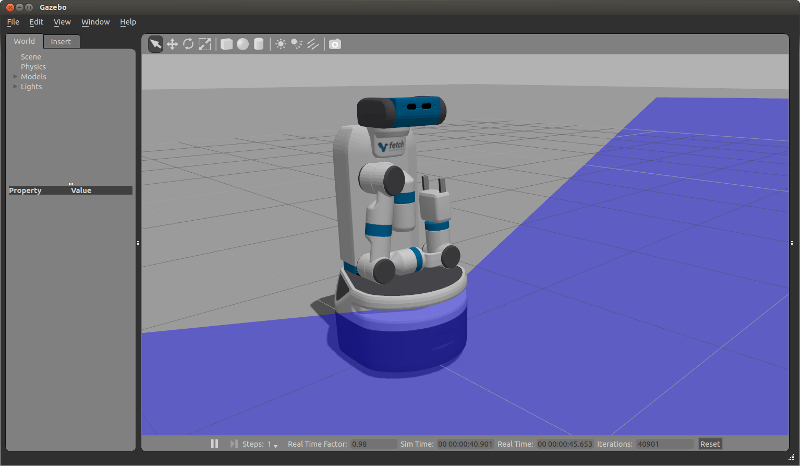
Tutorial Gazebo Simulation Fetch Freight Research Edition Melodic Documentation

Gazebo Project March Vi Documentation

How To Create A Ros Sensor Plugin For Gazebo The Construct

Libgazebo Ros Openni Kinect Plugin Wrong Color Image Gazebo Q A Forum
Gazebo Plugins Gazebo Plugins Gazebo Ros Dynamic Plugins
Gazebo Q A 001 How To Create Gazebo Plugins In Ros Part 1 The Construct

Genuino Gazebo Ros Gazebo Decorations Gazebo Robot Operating System

How To Move A Gazebo Model From Terminal Varhowto
Prismatic Joint Not Working Properly With Ros2 Gazebo 11 Gazebo Q A Forum

