Here is my manifestxml file from the package where the paths should be loaded. Human_model_gazebo last edited 2016-12-25 042228 by MoriKen Except where otherwise noted the ROS wiki is licensed under the Creative Commons Attribution 30.

Fixed Launching Robot On Ros Melodic Morenia Ubuntu 18 04 By Msqz Pull Request 5 Udacity Simple Arm Github
Rosrun gazebo_ros spawn_model -database coke_can -sdf -model coke_can3 -y 22 -x -03 To see all of the available arguments for spawn_model including namespaces trimesh properties joint positions and RPY orientation run.

Gazebo ros spawn model. Repository for spawning. This can be confusing. And how to structure the model file to include all the elements needed for any model in GAzebo.
Mycobot model seems to be spawned but it is interrupted by someone with signal_shutdown atexit. Finally back in your original terminal use the following command to add a robot. Rosrun gazebo_ros spawn_model -h URDF Example with Baxter.
Gazebo can use urdf since urdf has been made a standalone package. To see all of the available arguments for spawn_model including namespaces trimesh properties joint positions and RPY orientation run. 6 Run the URDF spawner node.
Click Insert in the top left. This ROS API enables a user to manipulate the properties of the simulation environment over ROS as well as spawn and introspect on the state of models. Rosrun gazebo_ros spawn_model -h Delete Model.
Search for jobs related to Gazebo ros spawn model or hire on the worlds largest freelancing marketplace with 20m jobs. Test that stand-alone Gazebo works. The second method of spawning robots into Gazebo allows you to include your robot within the world file which seems cleaner and more convenient but also requires you to add your robot to the Gazebo model database by setting an environment variable.
Add the following line to the bottom of the file. Its free to sign up and bid on jobs. Heres an example on how to use the script.
You probably should use xacro in ros and convert to urdf when interfacing with gazebo. I tested gazebolaunch on laptop host not Docker. A helper script spawn_model is provided for calling the model spawning services offered by gazebo ros node.
ROS Development Studio the environment used in the video another powerful online tool for pushing your ROS learning in a practical way. Before attempting to install the gazebo_ros_pkgs make sure the stand-alone Gazebo works by running in terminal. If you do not yet have a URDF to test as an example you can download the baxter_description package from Rethink Roboticss baxter_common repo.
This is not true for xacro so gazebo uses an sdf version of pr2. In the end I accidentially ran rosrun gazebo_ros spawn_model -urdf -param robot_description -model ur5 -z 01 -J shoulder_pan_joint 00 -J shoulder_lift_joint 00 -J elbow_joint -04 -J wrist_1_joint 00 -J wrist_2_joint 05 -J wrist_3_joint 00 in a separate terminal although the model was already loaded in gazebo via the launch file - and this respawned the model with the -J arguments. The first two arguments are the robots name in gazebo and a namespace for the robot if you would like to add more than one.
Ros-users Gazebo - spawn_model Català Dansk Deutsch Ελληνικά English Español suomi Français Galego magyar Italiano 日本語 Nederlands Polski Português Português Brasileiro Questo messaggio è parte di questo thread. HttpsgooglDuTPtKHere you have a fast tutorial for creating your own human models in a format that can be spawned in Gazebo7. Also test adding a model by clicking on the Insert tab on the left and selecting a model to add then clicking on the simulation to.
It integrates the ROS callback scheduler message passing with Gazebos internal scheduler to provide the ROS interfaces described below. Ros2 run gazebo_ros spawn_entitypy -topic robot_description -entity my_cam_bot. Repository for spawning URDF SDF or model files in gazebo using python c and roslaunch - GitHub - roboticist8ros_gazebo_spawn_models.
I am loading a joint_state_controller through the controller_manager and its even publishing a joint_state message. Xacro is a ros tool but gazebo is a standalone application outside of ros. In order to spawn a gazebo model in a simulation using ROS you need to have Gazebo and ROS installed.
Ros-users Gazebo - spawn_model Català Dansk Deutsch Ελληνικά English Español suomi Français Galego magyar Italiano 日本語 Nederlands Polski Português Português Brasileiro This message is part of the following thread. I am loading a SDF into Gazebo using the gazebo_rosspawn_model. Ros2 run robot_spawner_pkg spawn_turtlebot the_robot_name robot_namespace 00 00 01.
Publishing JointStates in ROS with Gazebo. Model Database Robot Spawn Method. The entity name will be the name of your model within gazebo so feel free to change my_cam_bot to whatever you want.
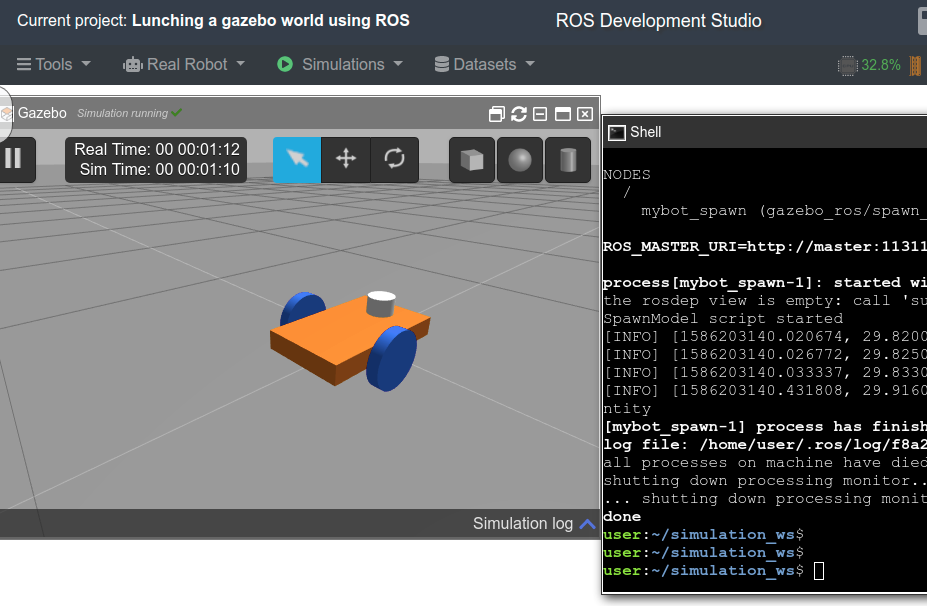
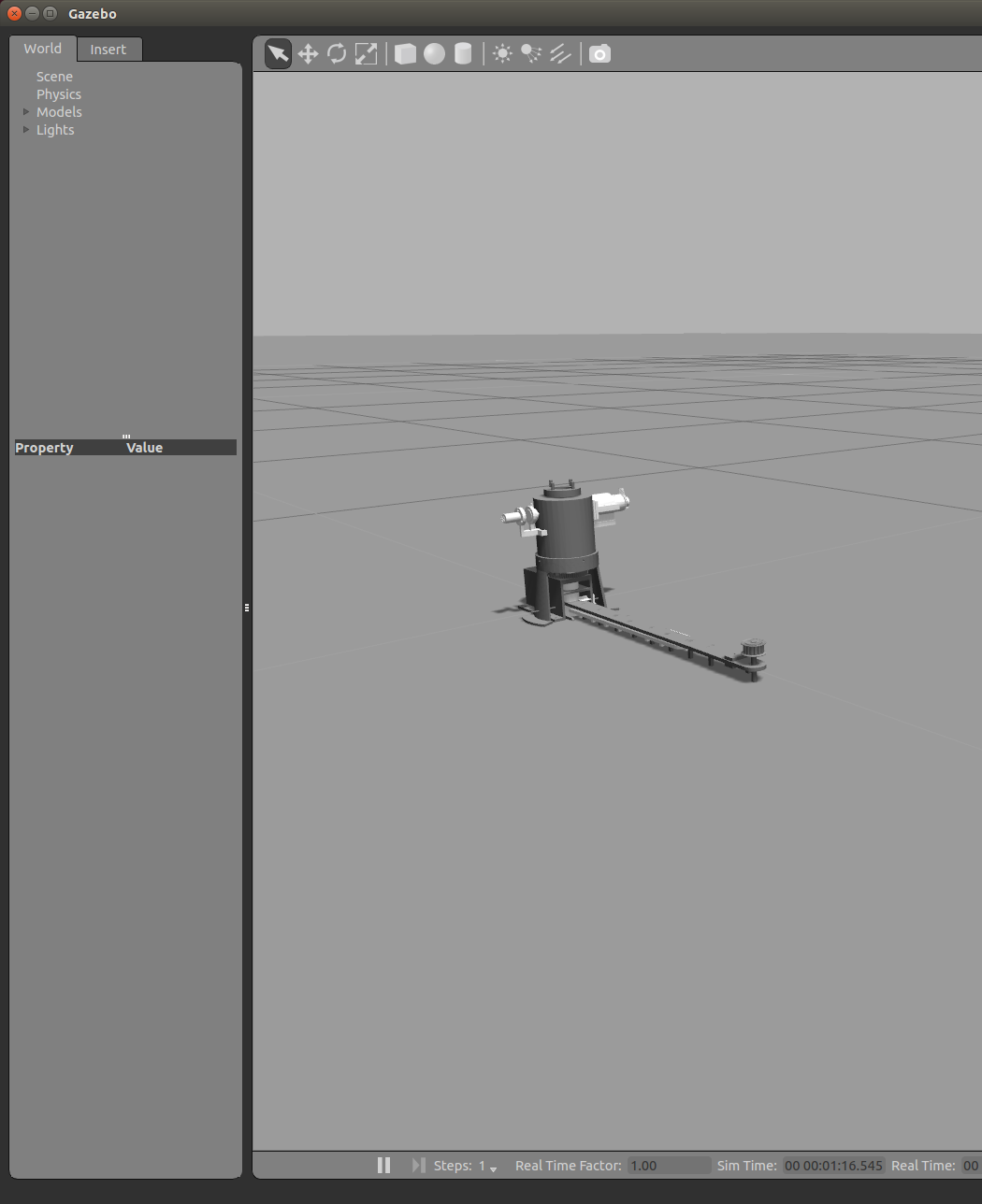
In this video we are going to show you how to spawn an SDF model correctly using a ROS package. What to exactly setup so that gazebo can find the model. My environment is following.
However there are no joints listed in the joint_state message despite it containing multiple not-fixed joints. Spawn Object to Gazebo via Terminal ROS Service Call By Frank Hu Have Gazebo Simulation started and open a different terminal tab and enter the following command to spawn a model urdf. You will learn what to exactly setup so that gazebo can find t.
Put this package into your. It will automatically spawn at the. Save the file and close it.
You should see the GUI open with an empty world. Make sure to change the package name and launch file name to match yours. Ubuntu 2004 ROS noetic Any suggestion is helpful for me.
Spawn a gazebo table model by the issuing the following command in another. To launch the model manually you will need to go to your bashrc file and add the path to the model so that Gazebo can find it. In this video were going to show you how to spawn an SDF model correctlyusing a ROS package.
As a workaround I copied all my models into gazebomodels and spawned them directly from the world file. This environment variable is required because of the separation of ROS dependencies from Gazebo. I will scroll down until I find Two Wheeled Robot.
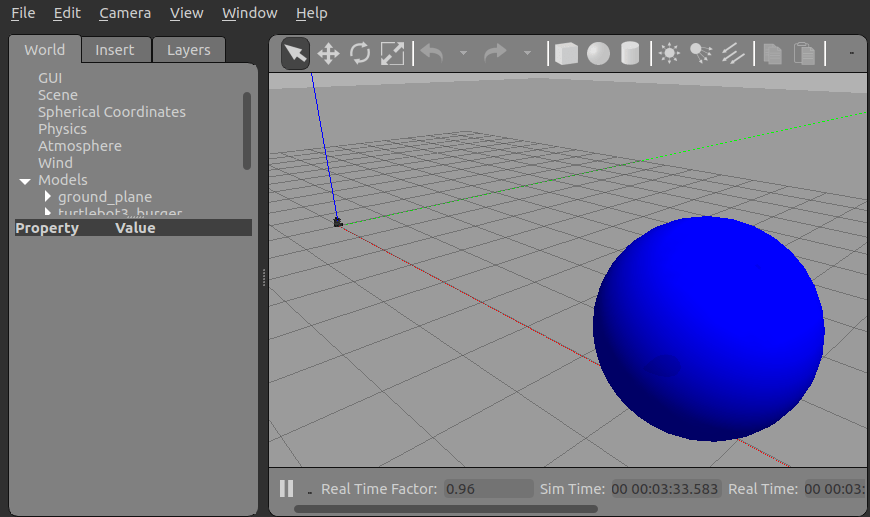
In this case we will be spawning a pillow answering to the question. There I use a world plugin to spawn models from my package this used to work in Gazebo 102 with Fuerte and it doesnt with 125 under Groovy. General 5 demo 2 ros2.
More ROS Learning Resources. Models in gazebo can be spawned and deleted dynamically using the services gazebospawn_model and gazebodelete_model.
Spawn 2 Different Robots In Gazebo Set The Launch File Properly Tfros101 The Construct Ros Community
Gazebo Spawning Model Incorrectly Ros Answers Open Source Q A Forum
Add Build And Remove Objects In Gazebo Matlab Simulink

Panda Robot Oscillates In Gazebo After Spawning Ros Answers Open Source Q A Forum
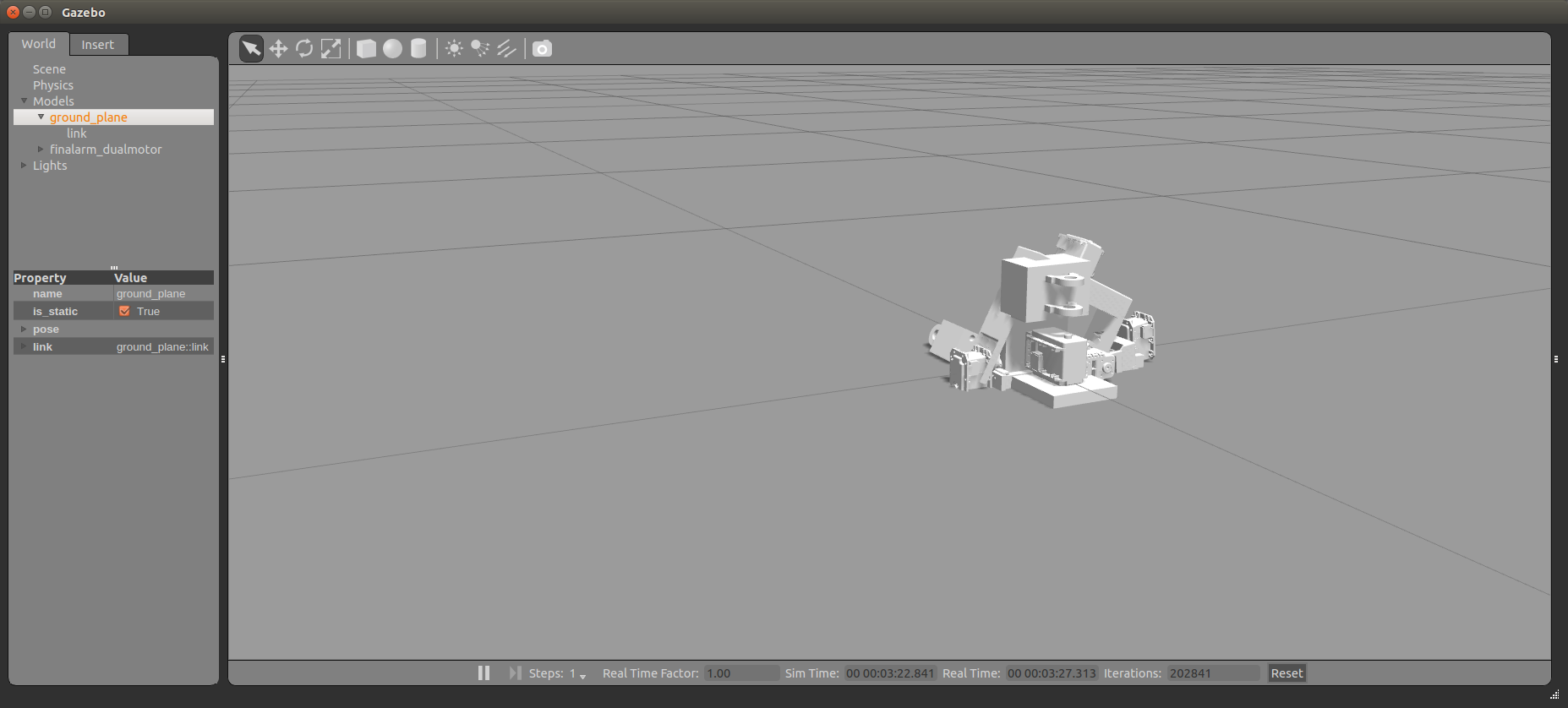
Robot Arm Is Broken Link By Link In Gazebo Ros Answers Open Source Q A Forum
Human Model Gazebo Urdfforrobotmodeling The Construct Ros Community

Human Model Gazebo Urdfforrobotmodeling The Construct Ros Community
Gazebo In 5 Minutes 003 How To Spawn A Robot In Gazebo The Construct
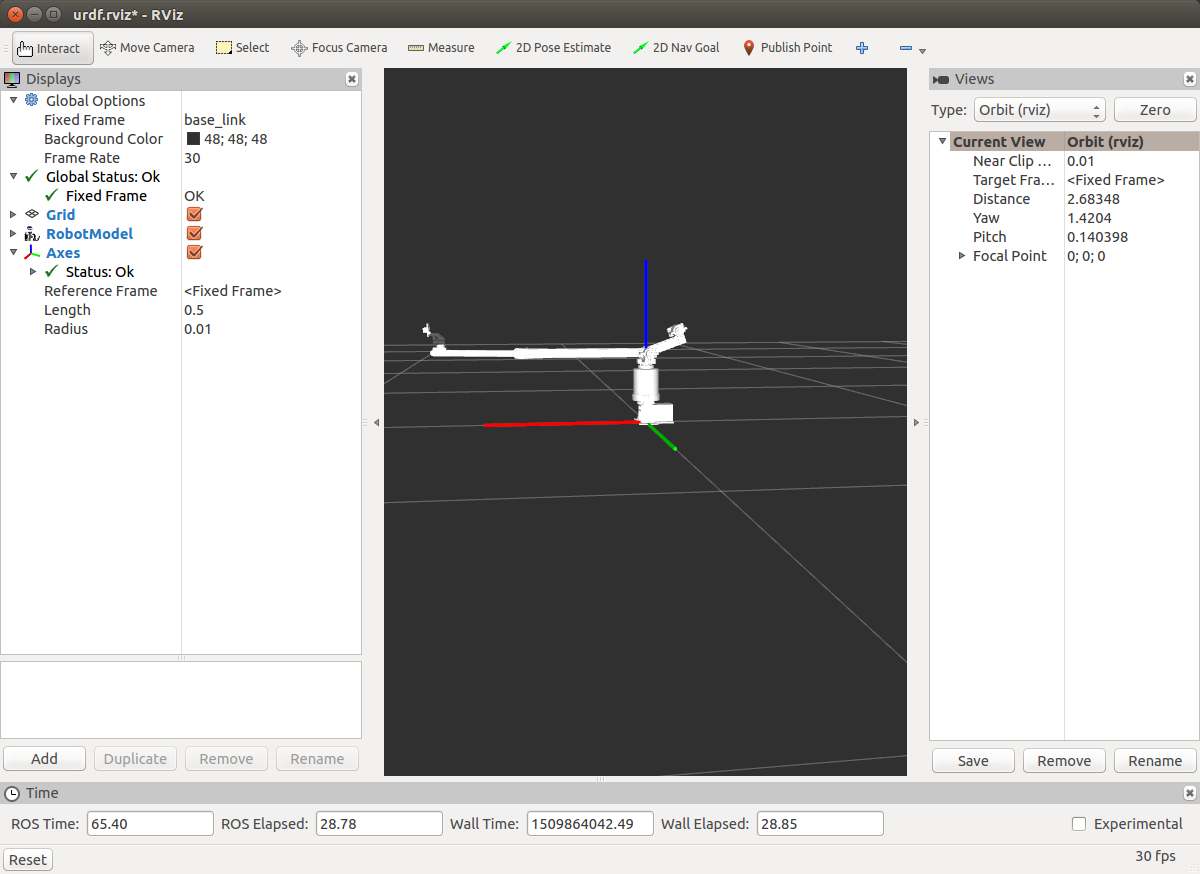
Spawn Urdf In Gazebo Problem Urdfforrobotmodeling The Construct Ros Community


Ros Q A How To Create And Spawn Humans In Gazebo7

Gazebo Q A 003 How To Spawn An Sdf Custom Model In Gazebo With Ros Youtube
Ros Q A Showing My Own Urdf Model In Gazebo The Construct
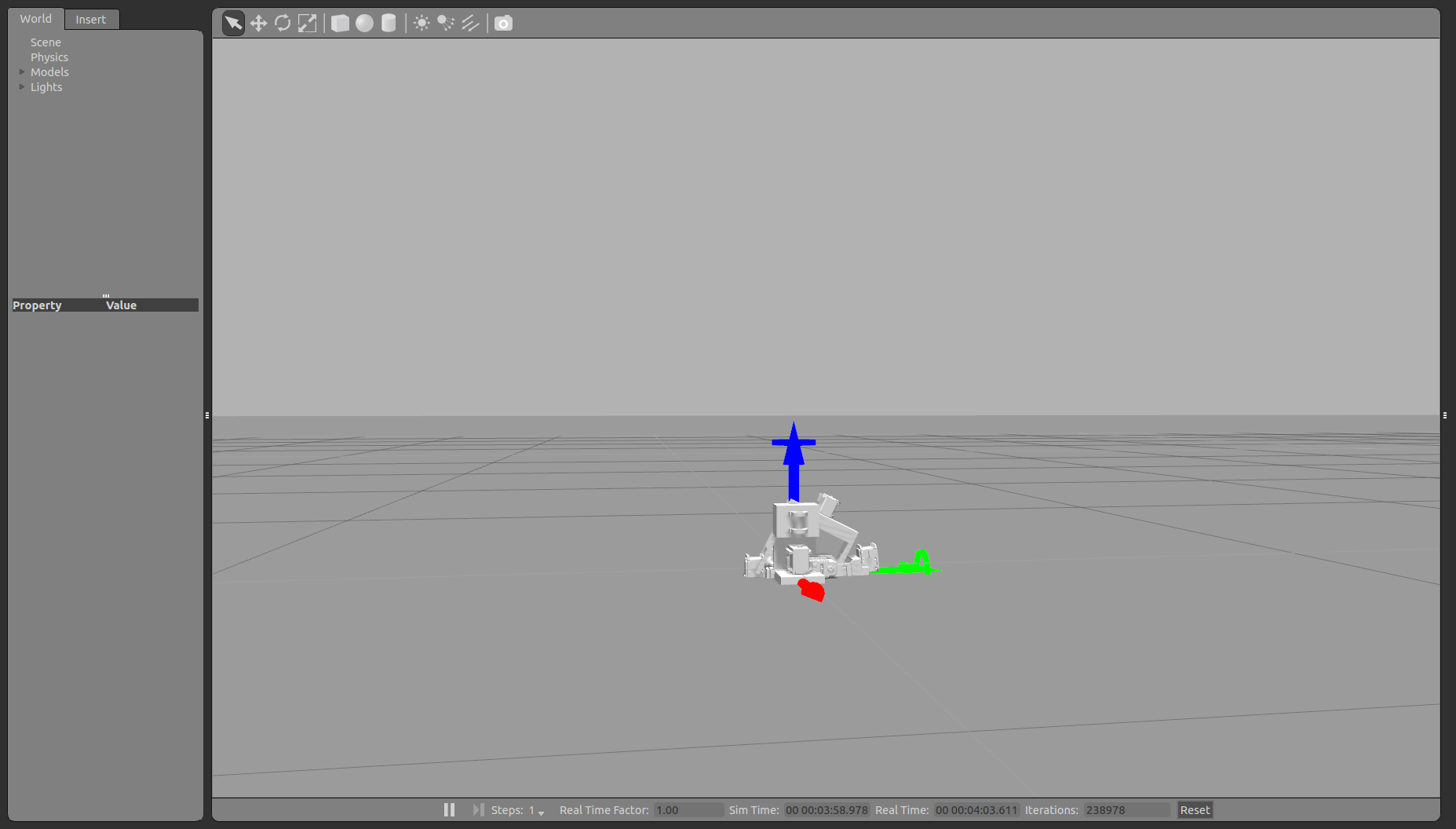
Robot Arm Is Broken Link By Link In Gazebo Ros Answers Open Source Q A Forum
Gazebo Spawning Model Incorrectly Ros Answers Open Source Q A Forum
Simulator Gazebo Tutorials Spawningobjectinsimulation
Tutorials/simple_box.png)

Ros Q A 166 Spawn Cassie Robot In Gazebo Youtube

Gazebo Q A 003 How To Spawn An Sdf Custom Model In Gazebo With Ros The Construct

Revision History Gazebo Q A Forum
Gazebo In 5 Minutes 003 How To Spawn A Robot In Gazebo The Construct

