Uses Gazebo as the physics engine. UR5 plans its motion ur5_mppy to follow the box.

Assignment 4 Matlab Ros Interface And Gazebo Simulation Multi Robot Control Nps Wiki
The Gazebo simulator is used for the simulation of the Turtlebot3 Waffle Pi robot.

Gazebo simulation python. The approach to robot control described here is not the best or only way to control the Atlas robot. Synchronization with Gazebo Classic via YARP. May 6 2020 217pm 1.
The UR5 uses a USB cam to detect a red box on a conveyor ur5_visionpy and publish its position. GitHub is where people build software. Purpose of the project.
Purpose of the project. The problem is when I put two robots in the simulation facing each other the. Python versions of all defined Gazebo protobuf messages are included.
I am having a problem with the movement of the turtlebot3 burger I am using the proportional controller to move the robot from one point to another. I have a Solidworks assembly model and I want it simulated using Gazebo in ROS Robot Operating System. It integrates the ROS callback scheduler message passing with Gazebos internal scheduler to provide the ROS interfaces described below.
Deep reinforcement learning for UAV in Gazebo simulation environment Quadrotor Pixhawk SITL ROS Gazebo Deep reinforcement learning Height ControlHov. Visit the documentation page for more information. Robot simulation is an essential tool in every roboticists toolbox.
This repository demonstrates UR5 pick-and-place in ROS and Gazebo. Gazebo is a 3D dynamic simulator with the ability to accurately and efficiently simulate populations of robots in complex indoor and outdoor environments. A Python package for rapid-prototyping and scripting of simulations for Gazebo.
Robot rrt ros gazebo slam constructs gazebo-simulator. Integrate ROS 2 and Gazebo Install gazebo_ros_pkgs. GitHub is where people build software.
Turtlebot3 in gazebo simulation controlling with python node using only odometry Course Support. This project is the client side of the Clock Plugin included in robotologygazebo-yarp-plugins with some sugar on topIt provides GazeboYarpSynchronizer a new class that extends the automatically generated resources from the thrift service and provides initialization and termination helpers. It is provided for demonstration purposes.
Import trollius from trollius import From import pygazebo import. When paired with ROS it can even simulate sensors including LID. Open a new terminal window and install the packages that will enable you to use ROS 2 to interface with GazeboWe need to install a whole bunch of stuff including the differential drive plugin that will enable us to control the speed of our robot using ROS 2 commands.
Once the end-effector gets close enough to the box it approaches the box with vacuum grippers turning on ur5_gripperpy. While similar to game engines Gazebo offers physics simulation at a much higher degree of fidelity a suite of sensors and interfaces for both users and programs. The Gazebo simulator is used for the simulation of the Turtlebot3 Waffle Pi robot.
The gazebo_ros_api_plugin plugin located with the gazebo_ros package initializes a ROS node called gazebo. This ROS API enables a user to manipulate the properties of the simulation environment over ROS as well as spawn and introspect on the state of. The Gazebo simulator is a very powerful tool for testing robotics right from your computer.
This software is a research prototype. This arrangement allows the controller to run in-line with the simulation approximating the on-robot situation in which the controller runs in a real-time environment. Python - Gazebo Simulation Environment for a UAV with Geometric Control.
The pcg_gazebo Python package is an Open Source Project extending the simulation capabilities of the robotics simulator Gazebo for automation and scripting of Gazebo simulations. The software is not ready for production use. Different environments can be swapped within launch files to generate a map of the environment.
The following example shows how easy it is to publish a message repeatedly to control a single joint in a Gazebo model running on the local machine on the default port. Visit the documentation page for more information. Solidworks assembly solidworks assembly files customer simulation using queue java profitable perform simulation using threadx simulation using win32 solidworks chair model free Solidworks furniture model library queue.
Go back to the terminal window and type CTRL C to close Gazebo. The pcg_gazebo Python package is an Open Source Project extending the simulation capabilities of the robotics simulator Gazebo for automation and scripting of Gazebo simulations. At your fingertips is.
It has neither been developed nor tested for a. A well-designed simulator makes it possible to rapidly test algorithms design robots perform regression testing and train AI system using realistic scenarios. The controller is executed as part of a Gazebo plugin.
Various algorithms have been integrated for Autonomously exploring the region and constructing the map with help of the 360-degree Lidar sensor. Programming Kinect with Python using ROS OpenCV and OpenNI Working with Point Clouds using Kinect ROS OpenNI and PCL Conversion of Point Cloud to laser scan data. Various algorithms have been integrated for Autonomously exploring the region and constructing the map with help of the 360-degree Lidar sensor.
Different environments can be swapped within launch files to generate a map of the environment. Based on asynciotrollius for flexible concurrency support. Gazebo offers the ability to accurately and efficiently simulate populations of robots in complex indoor and outdoor environments.
Solidworks Robotics Python C Programming See more. More than 65 million people use GitHub to discover fork and contribute to over 200 million projects. Uses a geometric controller that works great with aggressive maneuvers.
This repository include Python codes for the position control a UAV in a Gazebo simulation environment using geometric controllers. More than 65 million people use GitHub to discover fork and contribute to over 200 million projects. This software is a research.
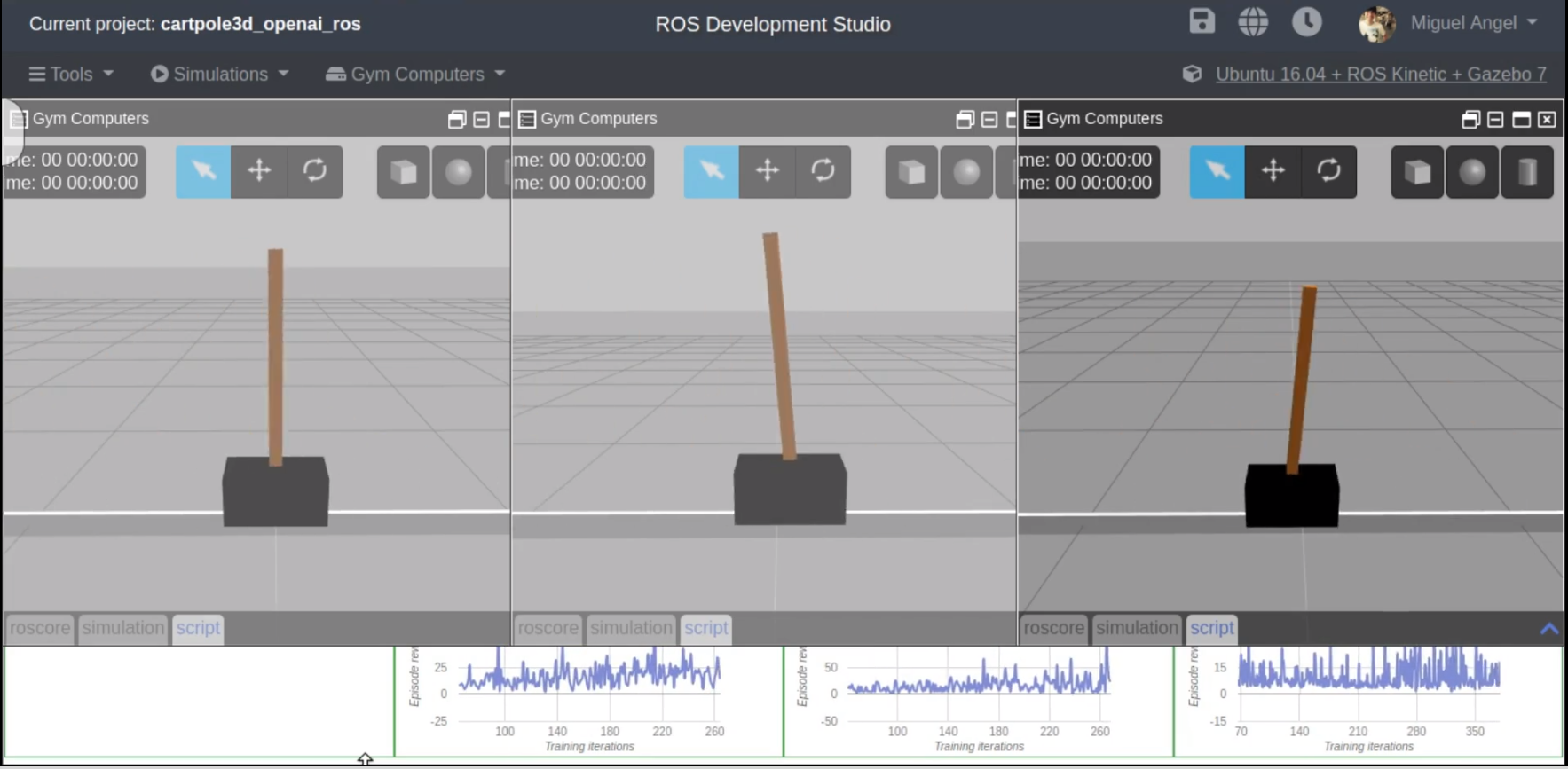
Testing Different Openai Rl Algorithms With Ros And Gazebo The Construct
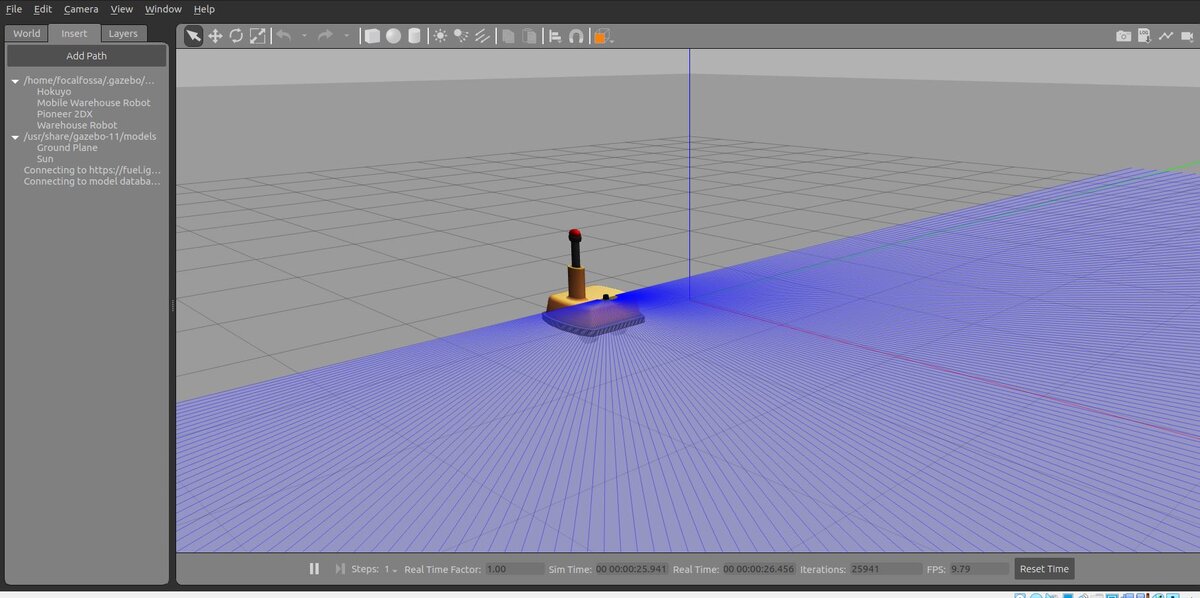
How To Simulate A Robot Using Gazebo And Ros 2 Automatic Addison

How To Simulate A Robot With Gazebo Ros Research Articles Arm Research Arm Community
Gazebo Simulator Github Topics Github
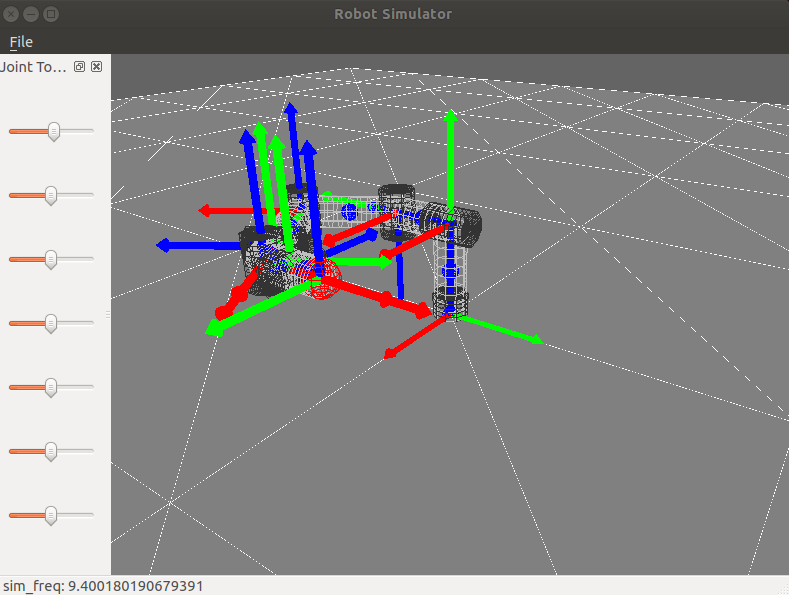
Python Robot Simulator Preview Nick Rotella
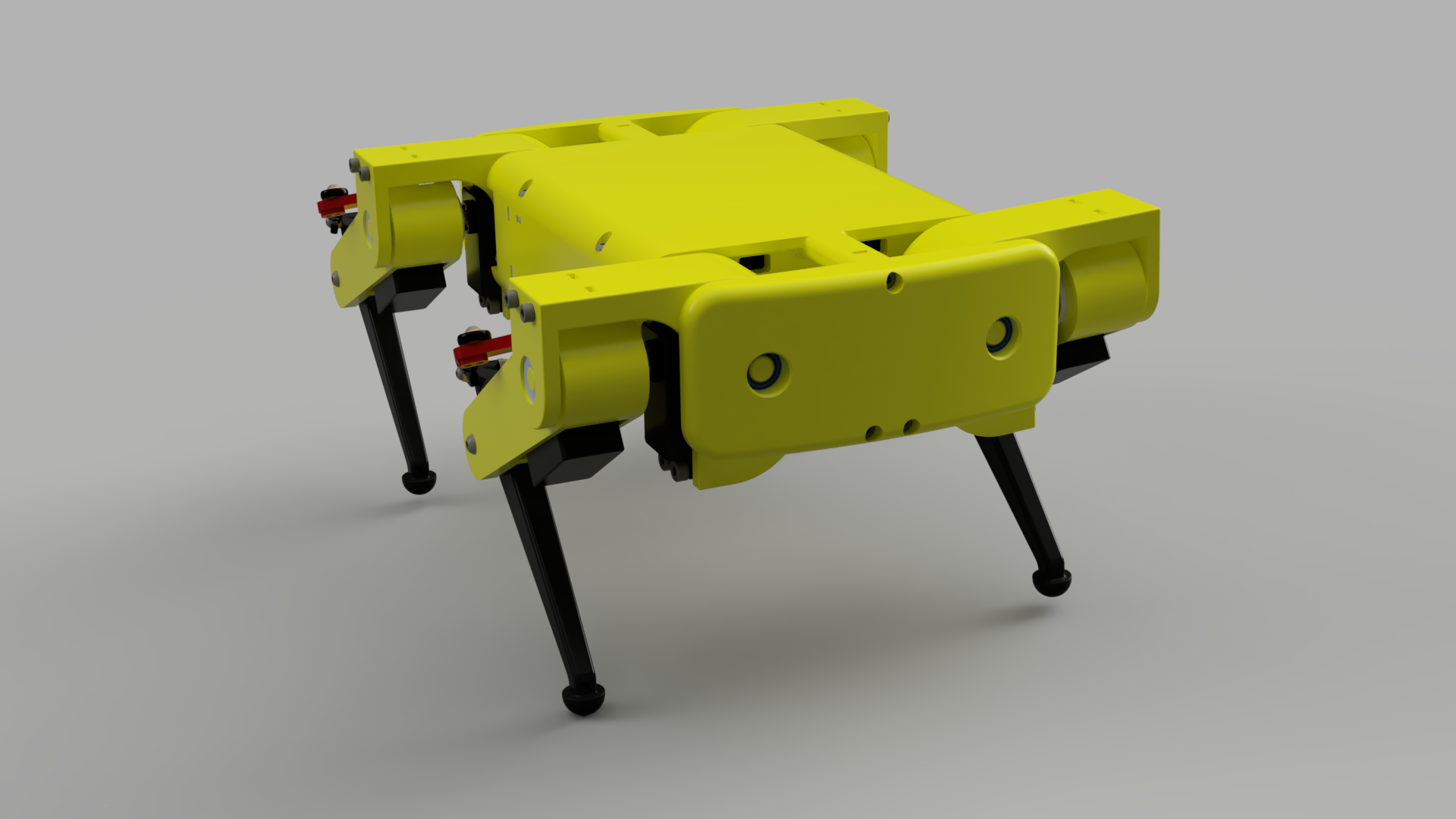
Simulate The Notspot Quadrupedal Robot Using Gazebo And Ros With Python
Gazebo Simulation Robotics Knowledgebase

Ros Projects Openai With Moving Cube Robot In Gazebo Step By Step Part5 The Construct

Ros Q A 035 How To Change Gravity In Gazebo With Python Youtube

Ros Projects Openai With Moving Cube Robot In Gazebo Step By Step Part2 The Construct
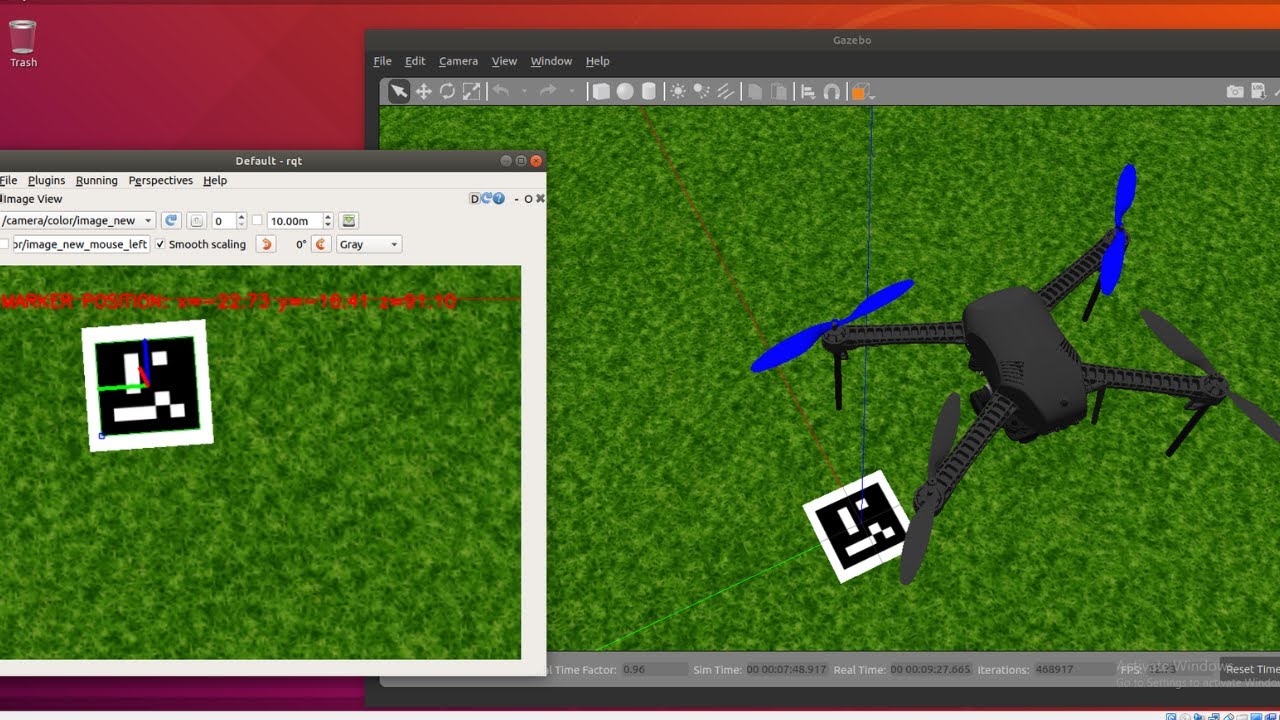
Simulate A Camera On A Drone With Gazebo Youtube
2

Ros Q A 149 How To Command Joint Position Of A Robot In Ros Using Python Youtube
Ros Tutorial How To Start Programming Drones Using Ros
Quiz Python For Robotics General Support The Construct Ros Community

Ros Q A 035 How To Change Gravity In Gazebo With Python Youtube
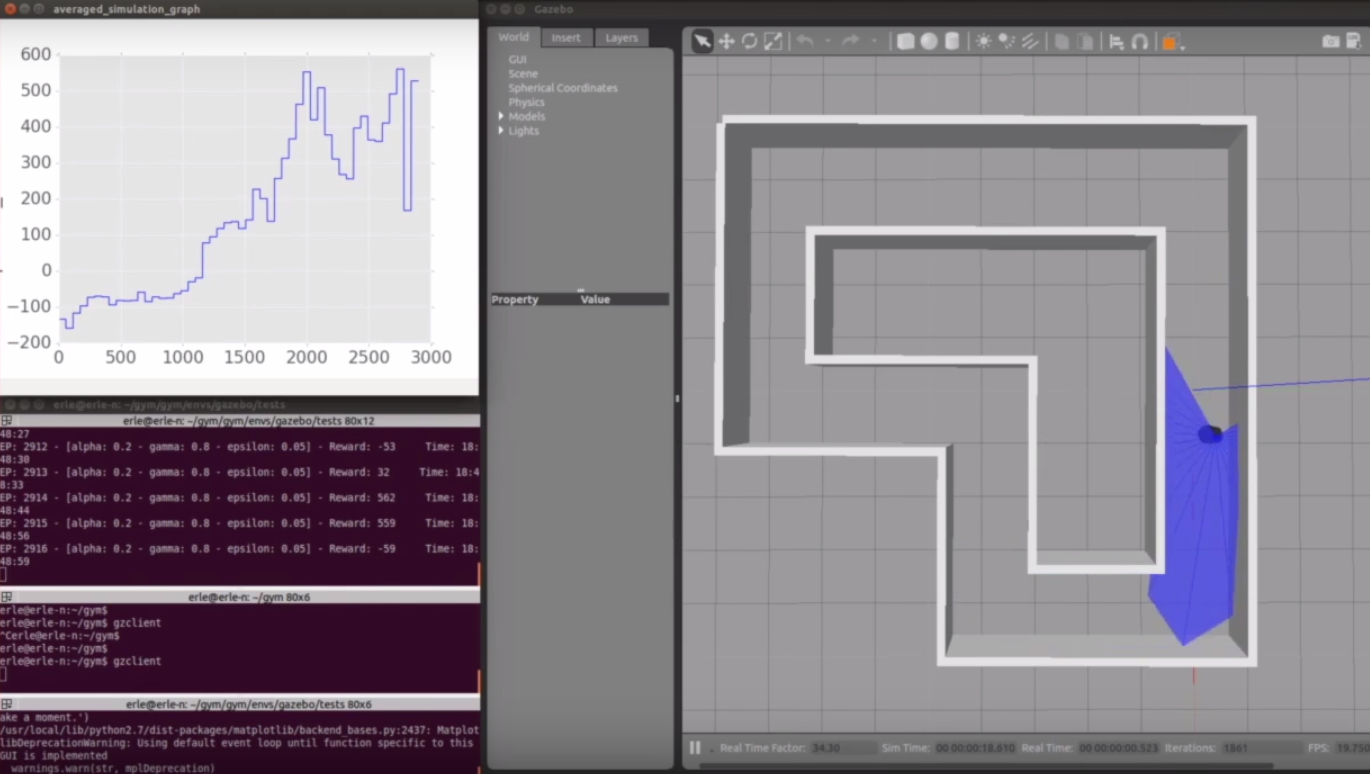
Reinforcement Learning With Ros And Gazebo Artificial Intelligence Research
Simulation Und Betrieb Des Darwin Op Mit Gazebo Und Ros
How To Simulate A Robot With Gazebo Ros Research Articles Arm Research Arm Community

